# Date 2023-07-01 19:05:33.641404
# Result
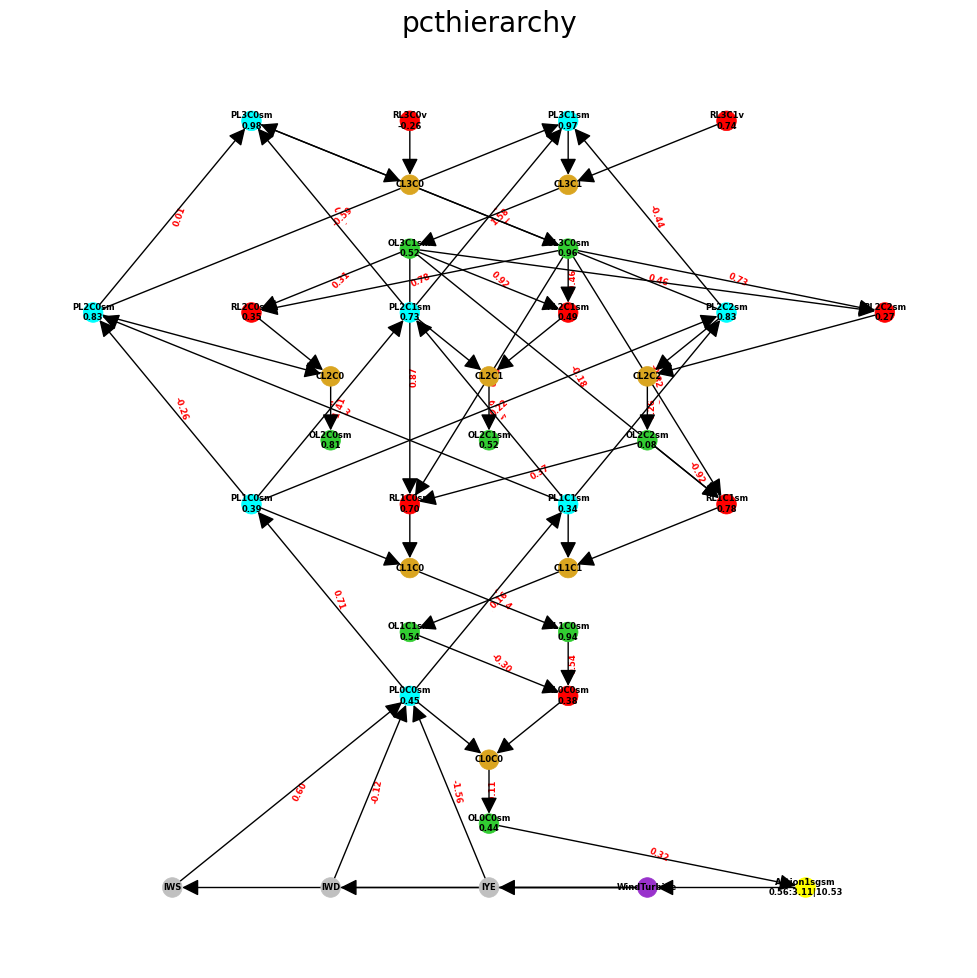
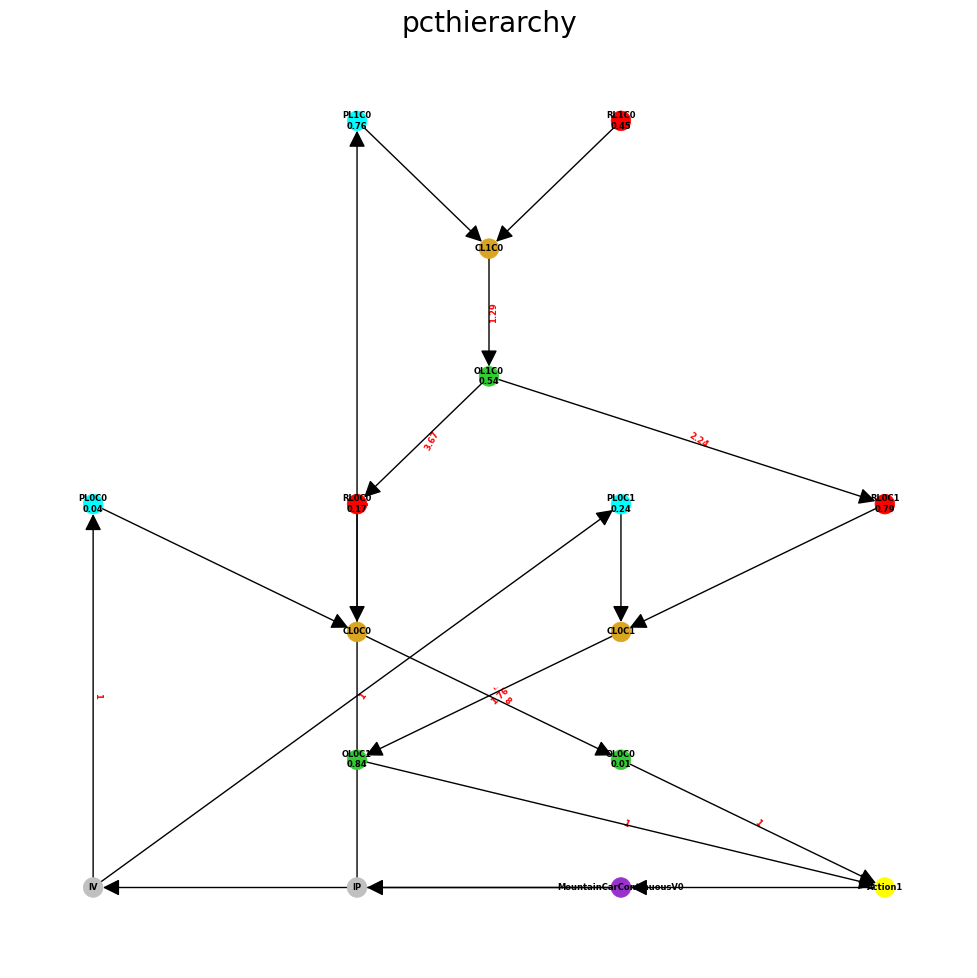
# Best individual
raw = grid: [2, 1]
env: [['MountainCarContinuousV0'], [0], [1]] act: [[1, 1]]
level0
col: 0 ref: [[3.672], 0.171] per: [[1], 0.04] out: [[-0.678], 0.011]
col: 1 ref: [[2.245], 0.79] per: [[1], 0.236] out: [[1.76], 0.841]
level1
col: 0 ref: [[0.45]] per: [[1], 0.764] out: [[1.291], 0.54]
config = {'type': 'Individual', 'name': 'pcthierarchy', 'pre': {'pre0': {'type': 'MountainCarContinuousV0', 'name': 'MountainCarContinuousV0', 'value': [0.0, 0.0, 0.0], 'links': {0: 'Action1'}, 'env_name': 'MountainCarContinuous-v0', 'reward': 0, 'done': True, 'info': {}}, 'pre1': {'type': 'IndexedParameter', 'name': 'IP', 'value': 0.0, 'links': {0: 'MountainCarContinuousV0'}, 'index': 0}, 'pre2': {'type': 'IndexedParameter', 'name': 'IV', 'value': 0.0, 'links': {0: 'MountainCarContinuousV0'}, 'index': 1}}, 'levels': {'level0': {'level': 0, 'nodes': {'col0': {'col': 0, 'node': {'type': 'PCTNode', 'name': 'L0C0', 'refcoll': {'0': {'type': 'EASmoothWeightedSum', 'name': 'RL0C0', 'value': -0.0, 'links': {0: 'OL1C0'}, 'weights': [3.6717124436775688], 'smooth_factor': 0.1712586159619749}}, 'percoll': {'0': {'type': 'EASmoothWeightedSum', 'name': 'PL0C0', 'value': 0.0, 'links': {0: 'IV'}, 'weights': [1], 'smooth_factor': 0.04005348677671297}}, 'comcoll': {'0': {'type': 'Subtract', 'name': 'CL0C0', 'value': -0.0, 'links': {0: 'RL0C0', 1: 'PL0C0'}}}, 'outcoll': {'0': {'type': 'EASmoothWeightedSum', 'name': 'OL0C0', 'value': 0.0, 'links': {0: 'CL0C0'}, 'weights': [-0.6781355729427617], 'smooth_factor': 0.010880609316351283}}}}, 'col1': {'col': 1, 'node': {'type': 'PCTNode', 'name': 'L0C1', 'refcoll': {'0': {'type': 'EASmoothWeightedSum', 'name': 'RL0C1', 'value': -0.0, 'links': {0: 'OL1C0'}, 'weights': [2.244745806835832], 'smooth_factor': 0.7897479531723087}}, 'percoll': {'0': {'type': 'EASmoothWeightedSum', 'name': 'PL0C1', 'value': 0.0, 'links': {0: 'IV'}, 'weights': [1], 'smooth_factor': 0.2361147455074499}}, 'comcoll': {'0': {'type': 'Subtract', 'name': 'CL0C1', 'value': -0.0, 'links': {0: 'RL0C1', 1: 'PL0C1'}}}, 'outcoll': {'0': {'type': 'EASmoothWeightedSum', 'name': 'OL0C1', 'value': -0.0, 'links': {0: 'CL0C1'}, 'weights': [1.7601945162568398], 'smooth_factor': 0.8412594680381309}}}}}}, 'level1': {'level': 1, 'nodes': {'col0': {'col': 0, 'node': {'type': 'PCTNode', 'name': 'L1C0', 'refcoll': {'0': {'type': 'EAConstant', 'name': 'RL1C0', 'value': 0.45, 'links': {}}}, 'percoll': {'0': {'type': 'EASmoothWeightedSum', 'name': 'PL1C0', 'value': 0.0, 'links': {0: 'IP'}, 'weights': [1], 'smooth_factor': 0.7641976478636343}}, 'comcoll': {'0': {'type': 'Subtract', 'name': 'CL1C0', 'value': -0.0, 'links': {0: 'RL1C0', 1: 'PL1C0'}}}, 'outcoll': {'0': {'type': 'EASmoothWeightedSum', 'name': 'OL1C0', 'value': -0.0, 'links': {0: 'CL1C0'}, 'weights': [1.2912361488002317], 'smooth_factor': 0.5399395563852809}}}}}}}, 'post': {'post0': {'type': 'EAWeightedSum', 'name': 'Action1', 'value': -0.0, 'links': {0: 'OL0C0', 1: 'OL0C1'}, 'weights': [1, 1]}}}
score = 0.33099
# Time 0.0584
### Description:
desc = MC08-ReferencedInputsError-RootMeanSquareError-Mode04
### Environment parameters
# Full list of input indexes from environment
# List of input indexes from environment for zero level if not full
# List of input indexes from environment for top level# List of reference values
# Number of actions
# Display names for environment inputs
env_name = MountainCarContinuousV0
env_inputs_indexes = [0, 1]
zerolevel_inputs_indexes = [1]
toplevel_inputs_indexes = [0]
references = [0.45]
num_actions = 1
env_inputs_names = [IP,IV]
environment_properties={}
### Configurable parameters
# Randomisation seed to reproduce results
# Size of population
# Number of generations
# Probability that an attribute will be mutated
# Probability that the structure will be mutated
# Number of runs of environment
# Lower limit of float values
# Upper limit of float values
# Initial limit of levels
# Initial limit of columns
# Lower limit of levels
# Lower limit of columns
# Limit of error on which to terminate individual evaluation
# Probability for crossover
# Probability for mutating an individual
# Number of times the evaulation is run (with different random seeds)
# Type of errors collected
# Error function
seed = 32
pop_size = 100
gens = 10
attr_mut_pb = 1
structurepb = 0
runs = 500
lower_float = -1
upper_float = 1
max_levels_limit = 2
max_columns_limit = 2
early_termination = False
min_levels_limit = 2
min_columns_limit = 2
error_limit = 100
p_crossover = 0.9
p_mutation = 0.5
nevals = 1
error_collector_type = ReferencedInputsError
error_response_type = RootMeanSquareError
### Additional properties
property1 = error:referenced_inputs,0&0.45
### Structure
# modes - pattern of nodes at particular levels, zero, n, top and zerotop
# the mode numbers refer to:
# 0 - per:bin-ws, ref:flt-ws, com:sub, out:flt-ws
mode = 4
# ### gen pop min mean max mut muts timing
### 0 100 0.841 0.972 1.107
### 1 100 0.625 0.969 1.218 51% 0% 0.106
### 2 100 0.524 0.932 1.219 55% 0% 0.051
### 3 100 0.520 0.841 1.220 49% 0% 0.055
### 4 100 0.520 0.795 1.220 49% 0% 0.051
### 5 100 0.398 0.785 1.219 53% 0% 0.054
### 6 100 0.342 0.770 1.218 46% 0% 0.054
### 7 100 0.342 0.746 1.218 48% 0% 0.051
### 8 100 0.331 0.706 1.218 53% 0% 0.054
### 9 100 0.331 0.731 1.218 56% 0% 0.054
### 10 100 0.331 0.677 1.219 53% 0% 0.053
# Best Score: 0.33099
# Best Ind: [[[['MountainCarContinuousV0'], [0], [1]], [[1, 1]]], [[[[[3.6717124436775688], 0.1712586159619749]], [[[1], 0.04005348677671297]], [[[-0.6781355729427617], 0.010880609316351283]]], [[[[2.244745806835832], 0.7897479531723087]], [[[1], 0.2361147455074499]], [[[1.7601945162568398], 0.8412594680381309]]]], [[[[0.45]], [[[1], 0.7641976478636343]], [[[1.2912361488002317], 0.5399395563852809]]]]]
# Mean time: 0.058